2 ฟังก์ชั่นการเก็บรวบรวมข้อมูลวิเคราะห์ / วิเคราะห์ / Balancer HG904 ฟังก์ชั่นการถ่ายโอนข้อมูลการวิเคราะห์ ความไม่สมดุลเป็นหนึ่งในสาเหตุหลักของการสั่นสะเทือนของเครื่องจักร ประมาณว่าประมาณร้อยละ 50 ของความผิดพลาดทั้งหมดเกิดจากความไม่สมดุลของใบพัด วิธีที่ดีที่สุดสำหรับการกำจัดความไม่สมดุลเชิงกลคือการสร้างสมดุลในพื้นที่งาน เครื่องวิเคราะห์ / บาลานเซอร์ HG904 มีประโยชน์อย่างยิ่งสำหรับจุดประสงค์นี้ มันสามารถวัดความเข้มของการสั่นสะเทือน วินิจฉัยสาเหตุการสั่นสะเทือนโดยวิเคราะห์สเปกตรัมความถี่ นอกจากนี้ยังสามารถใช้ในการวัดความเร็วในการหมุนและเฟสการสั่นสะเทือนและคำนวณน้ำหนักและตำแหน่งที่ไม่สมดุล
คุณสมบัติ:
- ง่ายต่อการใช้
- ภาพเวกเตอร์กระบวนการปรับสมดุลและผลลัพธ์แสดงอย่างชัดเจน
- การจัดเก็บข้อมูลสมดุล 10 ใบพัด
- สามารถเลือกได้ว่าจะลบหรือยังคงอยู่ของมวลทดลอง
- ย่อยสลายสมดุลผลลัพธ์ไปยังตำแหน่งที่ได้รับมอบหมายสองแห่ง
- ช่วงน้ำหนักทดลองใช้คำนวณตามน้ำหนักของโรเตอร์ความเร็วในการหมุนรัศมีและเกรดสมดุลที่ต้องการ
- ความถูกต้องของการทดลองจำนวนมากถูกตัดสินโดยอัตโนมัติ
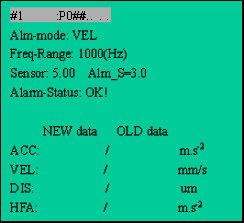
- การวัด RPM, แอมพลิจูดและเฟส
- ฟังก์ชั่นการวิเคราะห์สเปกตรัม FFT ในสถานที่ 400 สาย
- การรวบรวมข้อมูลสองช่องทางพร้อมกัน
- demodulation ฮาร์ดแวร์ห่อหุ้มสำหรับการวิเคราะห์แบริ่งและเกียร์
- ฟังก์ชั่นการถ่ายโอนสำหรับการวัดความถี่ธรรมชาติ
- การแสดงรูปคลื่นและสเปกตรัมโดยจอแอลซีดีขนาดใหญ่
- การจัดเก็บค่าการสั่นสะเทือนและรูปคลื่นการสั่นสะเทือน
สภาพการทำงาน
- ช่วงอุณหภูมิ: จาก 5 ° C ถึง 50 ° c
- ความชื้นสัมพัทธ์: < 85%, ไม่อิ่มตัว
- ปราศจากก๊าซกัดกร่อน
- ไม่มีสนามแม่เหล็กไฟฟ้าแรงและแรงกระแทก
ความปลอดภัย
HG904 ไม่ได้รับอนุญาตให้ติดต่อกับส่วนที่ทำงานอยู่ของเครื่อง
ข้อมูลจำเพาะ:
- ช่วงความเร็วการหมุนสำหรับการปรับสมดุลแบบไดนามิก: 70-60,000 รอบ / นาที
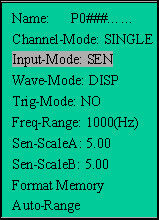
- เลือกช่วงอัตโนมัติและเลือกช่วงเองได้
- การวัดความแม่นยำของการสั่นสะเทือน: 5%
l เซ็นเซอร์: accelerometer Piezoelectric, ความเร็ว Magnetoelectricity, การเคลื่อนที่วนและอื่น ๆ
- ลำดับที่ 8 ลำดับ วงรีตัวกรองการลบรอยหยักตัวกรอง RPM band-pass
- สัญญาณอินพุต: มาตรความเร่งและแรงดันไฟฟ้า
- การวิเคราะห์สเปกตรัมกว้าง: 100 บรรทัดถึง 400 บรรทัด (ซูม), หน้าต่าง Hanning
- ช่วงความถี่ของการวิเคราะห์สเปกตรัม: 100, 200, 500, 1K, 2K, 5K, 10KHz (สำหรับการสุ่มตัวอย่างแบบ 1 ช่องเท่านั้น)
- การจัดเก็บข้อมูล: 400 รูปคลื่นของ 1024 จุดและชุดข้อมูล 400
- ช่วงกว้างและการตอบสนองความถี่สำหรับการวัดการสั่นสะเทือนโดยรวม:
| ช่วงกว้าง | การตอบสนองความถี่ |
| การกำจัด | 0.003 - 5 มม. สูงสุด - สูงสุด | 10 - 500 Hz |
| ความเร็ว | 0.2 - 200mm / s RMS จริง | 10 - 1,000 Hz |
| การเร่งความเร็ว | 0.5 - 250m / s 2 จุดสูงสุด | 20 - 5,000 Hz |
| ซองจดหมาย | 0.1 - 20 หน่วย RMS จริง | 5-1000Hz จาก 15-40 KHz |
| แรงดันไฟฟ้า | 0.1 - 10V พีคพีค | 10 - 10,000 Hz |
- Notepad: รหัสเงื่อนไข 10 ข้อสำหรับการตรวจสอบด้วยภาพ
- เอาท์พุท: USB สำหรับการสื่อสารกับพีซี
- พลังงาน: แบตเตอรี่แบบชาร์จไฟได้ Ni-MH สำหรับการทำงานต่อเนื่อง 8 ชั่วโมงการเตือนแบตเตอรี่ต่ำ
- สภาพแวดล้อมการทำงาน: 0 ~ 55 o C ความชื้น 90% ไม่กลั่นตัว
- การวัดความเร็วในการหมุนพร้อมเซ็นเซอร์ตาแมว
- ช่วงไดนามิก: 60dB พร้อมช่วงอัตราขยาย 48dB ที่ปรับได้
- ขนาด: 21 × 13 × 4 ซม.; น้ำหนัก: 1.2 กก. (รวมแบตเตอรี่)

รายการแพ็ค HG904
ตัวรวบรวมข้อมูลการสั่นสะเทือน HG904 1
มาตรความเร่ง 2
แม่เหล็กติด 2
หัวต่อเหล็ก 1
เครื่องชาร์จแบตเตอรี่ 1
สายเคเบิลมาตรความเร่ง 3
สายเคเบิลสื่อสาร RS232c 1
โมดูลการทรงตัว 1
เซ็นเซอร์ Tacho / ทริกเกอร์และสายเคเบิล 1
ชุดกระดาษสะท้อนแสง 1
คู่มือเริ่มต้นอย่างรวดเร็ว 1
แผ่นซีดีซอฟต์แวร์ 1
ใบรับรองของ HG904 และเซ็นเซอร์ 3
กระเป๋าใส่ 1
หลักการสมดุล
ความไม่สมดุลของโรเตอร์ 1 ระนาบคืออะไร?
โรเตอร์แข็งทำงานภายใต้ความเร็วที่น้อยกว่าความเร็วในการหมุนของคริติคอลลำดับแรกและสามารถละเลยการเสียรูปได้ เมื่อคุณภาพของโรเตอร์แข็งเกือบจะเน้นไปที่ดิสก์กล่าวคืออัตราส่วนของความยาวแกนและเส้นผ่านศูนย์กลางน้อยกว่า 0.5 เราสามารถสร้างสมดุล 1 ระนาบกับมันและรับผลที่น่าพอใจ
แต่สำหรับโรเตอร์ที่ยืดหยุ่นการเปลี่ยนรูปนั้นไม่สามารถละเลยได้ ดังนั้นวิธีการสมดุลจึงแตกต่างจากโรเตอร์แข็ง อย่างไรก็ตามโรเตอร์ที่มีระนาบที่ไม่สมดุลเพียงอย่างเดียวสามารถปรับสมดุลได้ตามวิธีการปรับสมดุลของระนาบ 1 ระนาบของโรเตอร์แข็ง สำหรับข้างต้นไม่ว่าโรเตอร์ที่แข็งหรือยืดหยุ่นคุณภาพของความไม่สมดุลจะเน้นไปที่ดิสก์หนึ่งแผ่นเสมอดังนั้นทั้งคู่จึงสามารถปรับสมดุลได้ตามวิธีของโรเตอร์บาลานซ์แบบ 1 ระนาบ ในโรงงานและโรงงานเครื่องจักรหมุนดังกล่าวมีอยู่ทั่วไปเช่นปั๊มเครื่องช่วยหายใจเป็นต้น
หลักการสมดุลแบบ 1 ระนาบ
เครื่องชั่ง 1 ระนาบของ HG904 ใช้วิธีการของสัมประสิทธิ์อิทธิพลซึ่งเรียกอีกอย่างว่าวิธีการสมดุลของการวัดระยะ 1 ระนาบ เช่นเดียวกับชื่อที่แสดงถึงมันเป็นความปรารถนาที่จะทำการวัดด้วยเฟสของการสั่นสะเทือนความเร็วรอบเมื่อทำการวัดความกว้างของการสั่นสะเทือนของโรเตอร์ การสั่นสะเทือนความเร็วรอบการหมุนสามารถระบุเป็นเวกเตอร์ กระบวนการของการทรงตัว 1 ระนาบมีดังนี้:
- วัดและรับเวกเตอร์การสั่นสะเทือนความเร็วรอบเริ่มต้น (A0) ภายใต้สภาวะการทำงานปกติ
- โหลดมวลทดลองที่เหมาะสม (M) บนโรเตอร์จากนั้นวัดเวกเตอร์การสั่นสะเทือน (A01) ภายใต้เงื่อนไขของความเร็วการหมุนเดียวกัน
- คำนวณมวลสมดุล (Q) ซึ่งควรจะโหลดบนโรเตอร์ตามสูตรต่อไปนี้:
Q = - M x A0 / (A01 - A0)
ในระหว่างการทรงตัวการสั่นสะเทือนทั้งหมดควรวัดภายใต้ความเร็วการหมุนเดียวกันเนื่องจากแรงไม่สมดุลของโรเตอร์เกี่ยวข้องกับความเร็วในการหมุน
หลักการสมดุล 2 ระนาบ
ความสมดุลเกือบทั้งหมดของโรเตอร์ช่วงเดียวสามารถทำได้โดยวิธีการของ 2 สมดุลระนาบแบบไดนามิก ตามความเป็นจริงความสมดุลแบบไดนามิก 1 ระนาบเป็นเพียงหนึ่งตัวอย่างพิเศษของความสมดุลแบบไดนามิก 2 ระนาบ
เมื่อทำการปรับสมดุลแบบไดนามิก 2 ระนาบจะต้องใช้ระนาบการเพิ่มมวลสองอันและการวัดการสั่นสะเทือนสองจุด เครื่องสมดุลแบบไดนามิก 2 ระนาบของ HG904 ยังใช้วิธีการของสัมประสิทธิ์อิทธิพล แต่ความแตกต่างจากสมดุลแบบไดนามิก 1 ระนาบคือควรวัดการสั่นสะเทือนของจุดวัดสองจุดเมื่อเพิ่มมวลทดลองเข้ากับหนึ่งในเครื่องบิน นั่นเรียกว่าเอฟเฟกต์โต้ตอบ เครื่องสมดุลแบบไดนามิก 2 ระนาบมีสัมประสิทธิ์อิทธิพล 4 แบบ
ขั้นตอนในการทำสมดุลแบบไดนามิก 2 ระนาบมีดังต่อไปนี้:
- วัดค่าเริ่มต้นของจุดวัดสองจุด
- โหลดมวลทดลองไปยังระนาบแรกจากนั้นวัดการสั่นสะเทือนของสองจุดวัดตามลำดับ
โหลดมวลทดลองไปยังระนาบที่สองจากนั้นวัดการสั่นสะเทือนของสองจุดวัดตามลำดับ - รับข้อสรุปของมวลการแก้ไข
หากทราบค่าสัมประสิทธิ์อิทธิพลจะสามารถป้อนได้โดยตรงและสามารถข้ามขั้นตอนข้างต้น (2) ได้
ภาคผนวก
ระดับสมดุลของโรตารี่แข็ง
(สรุปจาก ISO 1940 / 1-1986 ข้อกำหนดระดับสมดุลของโรเตอร์แข็ง - การสั่นสะเทือนของเครื่องจักร)
| เครื่องชั่งเกรด | G (มม / วินาที) | ตัวอย่างของประเภทโรเตอร์ |
| G4000 | 4000 | ชุดเกียร์แกนคดเคี้ยวคงที่อย่างแน่นหนาสำหรับเครื่องยนต์ดีเซลที่มีความเร็วรอบต่ำพร้อมก๊าซจำนวนมากที่ใช้เป็นพิเศษสำหรับเรือ |
| G1600 | 1600 | ชุดการส่งแกนแบบคดเคี้ยวคงที่อย่างเข้มงวดของเครื่องยนต์ 2 จังหวะที่ยอดเยี่ยม |
| G630 | 630 | ชุดเกียร์ 4 แกนแบบคดเคี้ยวจับจ้องอย่างแน่นหนา ชุดส่งกำลังแบบแกนบิดที่โค้งงอคงที่ของเครื่องยนต์ดีเซลที่ใช้เป็นพิเศษสำหรับเรือ |
| G250 | 250 | ชุดเกียร์แกนคดเคี้ยวคงที่อย่างแน่นหนาสำหรับเครื่องยนต์ดีเซลแก๊ส 4 รอบต่อนาทีสูง |
| G100 | 100 | ชุดเกียร์แกนคดเคี้ยวของเครื่องยนต์ดีเซล RPM ความเร็วสูงพร้อมแก๊ส 6 ตัวหรือมากกว่า เครื่องยนต์ทั้งหมดของรถบรรทุกหรือรถยนต์ (เครื่องยนต์ดีเซลหรือแก๊ส) |
G40 | 40 | ล้อหน้าแปลนแกนส่งของรถยนต์ ชุดเกียร์แกนคดเคี้ยวคงที่มีความยืดหยุ่นสูงของเครื่องยนต์ 4 จังหวะ RPM ความเร็วสูงพร้อมแก๊ส 6 ตัวหรือมากกว่า ชุดเกียร์แกนคดเคี้ยวของรถบรรทุก |
G16 | 16 | แกนส่งกำลังที่มีความต้องการพิเศษ (แกนหมุนเพลา, แกนทุกทิศทาง) ชิ้นส่วนของเครื่องบด อะไหล่เครื่องจักรกลการเกษตร เครื่องยนต์ของรถยนต์รถบรรทุกและหัวรถจักร (ทั้งเครื่องยนต์ดีเซลหรือแก๊ส) ชุดการส่งสัญญาณ Crooked-axes ของผู้ให้บริการที่มีแก๊สตั้งแต่ 6 ตัวขึ้นไปภายใต้เงื่อนไขพิเศษ |
G6.3 | 6.3 | ชิ้นส่วนของเครื่องยนต์หลัก Tub wheel ของเครื่องแรงเหวี่ยง ลูกกลิ้งกระดาษเครื่องจักรลูกกลิ้งของ presswork แฟน โรเตอร์ของสายเทอร์โบการบินที่ประกอบ มู่เล่ ล้อปั๊ม ชิ้นส่วนของเครื่องกลึงและเครื่องจักรกลทั่วไป เกราะทั่วไปหรือเกราะใหญ่โดยไม่ต้องมีความต้องการพิเศษ (ความสูงของแกนกลางไฟฟ้าสูงสุด 80 มม.) เกราะขนาดเล็กซึ่งมักจะให้ผลอย่างมากและใช้ภายใต้เงื่อนไขที่ไม่ไวต่อการสั่นสะเทือนหรือมีชุดสำหรับการสั่นสะเทือนแบบแยก เครื่องยนต์ทั้งหมดที่มีความต้องการพิเศษ |
G2.5 | 2.5 | ใบพัดแข็งของเครื่องกำเนิดไฟฟ้ากังหัน ดิสก์และกลองของคอมพิวเตอร์ คอมเพรสเซอร์เทอร์โบ ชุดเกียร์ของเครื่องกลึง เกราะทั่วไปหรือเกราะขนาดใหญ่ที่มีความต้องการพิเศษ |
G1 | 1 | ชุดส่งเทปบันทึกเสียงและแผ่นเสียง (รูปถ่าย) ชุดเกียร์ของเครื่องบด เกราะขนาดเล็กที่มีความต้องการพิเศษ |
G0.4 | 0.4 | แกนหลัก, ล้อบดและกระดองของเครื่องบดแม่นยำ เครื่องมือวัดการหมุนวน |

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!





































